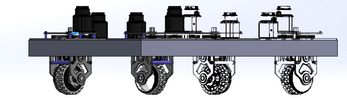
Swerve Drive
This project was an attempt at making custom drive method that would offer the greatest amount
of freedom for navigating in flat surfeces, as can be seen in high school robotics competitions.
taking inspiration from the well known concept of Swerve Drive,
I created a drivetrain capable of reaching reach any point in space in a straight line without ever
needing to turn to face the direction of movement, an alternative way to phrase this unique ability is "the rotation and translation are completely independent"
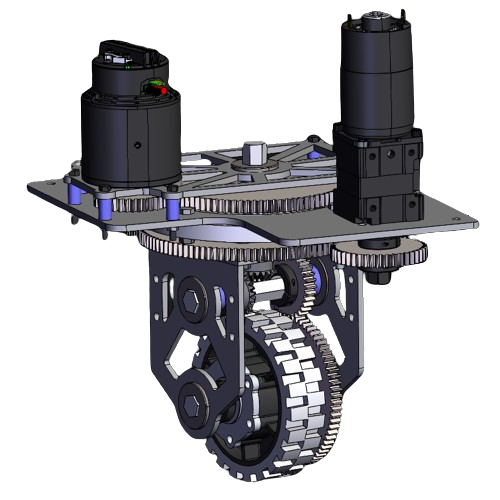
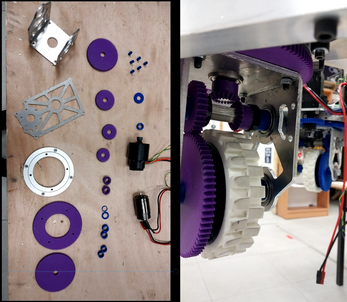
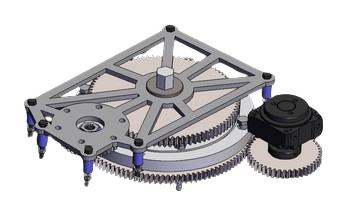
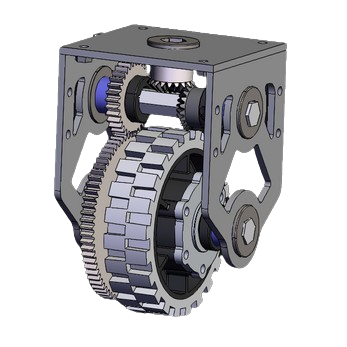
this project took two months and required CAD design, prototyping, CNC cutting and assembly,
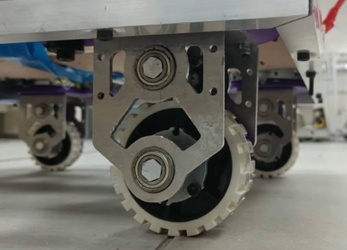
i am overall pleased with the results and especially with the combination of printed and aluminium parts. as can be seen in the videos linked below, everything works as intended.
Click here to see a video of the thing spinning around.
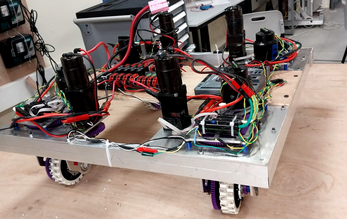
the coding and electronics were made by two other people while i did the engineering and manifacturing. this was all done inside the
school's robotics shop, we worked on it at night when there was no school activity.
here is another video showcasing the development steps with many images in chronological order.
we stopped working on the project when we reached the first fully working prototype.